
Dataframes from multimodal logs
Rerun 0.19 brings two huge new features; the ability to view and query back Rerun data as dataframes, and part one of supporting encoded video data.
Rerun 0.19 brings two huge new features; the ability to view and query back Rerun data as dataframes, and part one of supporting encoded video data.

To enable working with more kinds of datasets in Rerun, the 0.18 release introduces a new column oriented API and performance improvements to help handle larger time-series.

Rerun 0.17 introduces blueprint defaults and overrides, bringing a massive step up in user control. For any visualizer input, you can now use the blueprint to set default values or override the data you logged.

You can now specify some blueprint properties through the Python log API. Among other things this lets you control the visible time range query per view from code.

Rerun 0.15 introduces Blueprint Python APIs for controlling the layout and contents of views in the Rerun Viewer. It also introduces the ability to save and load blueprints from file.
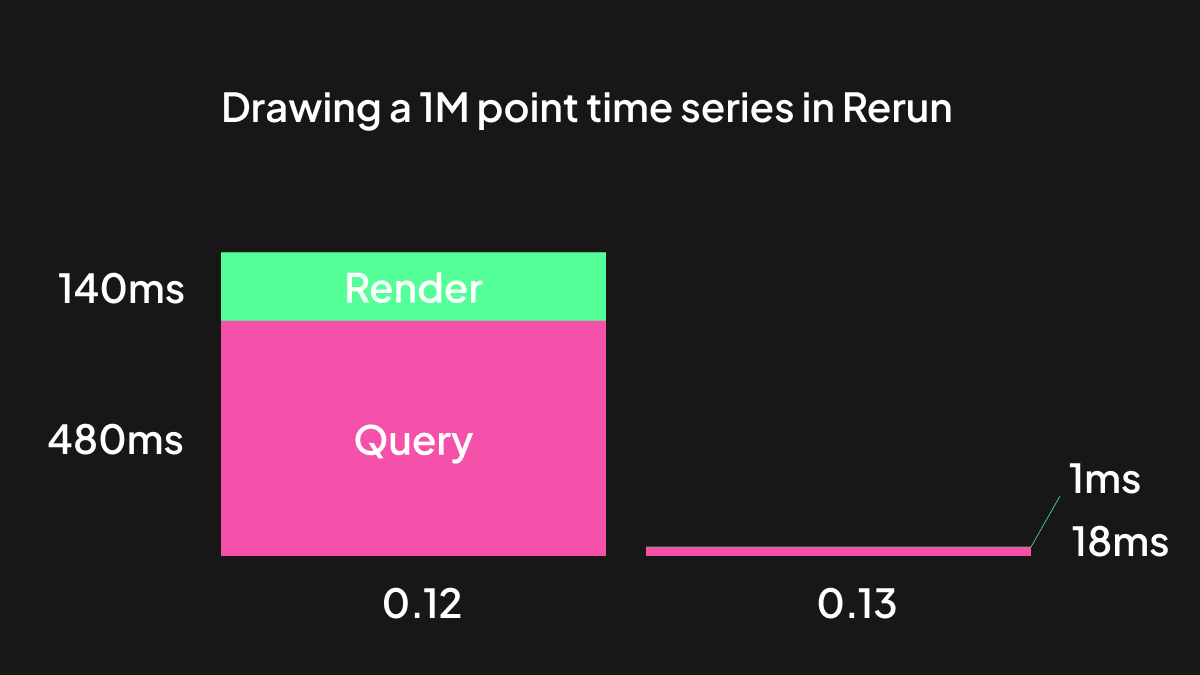
This is a follow up post that dives into how we managed to achieve such huge performance gains for time series (among other things), and why it was so hard in the first place.

The 0.13 release means teams can now correlate kHz resolution motion and perception data in Rerun. Seeing all your data and state together, correlated over time, is the most powerful thing you can do to understand your systems better.
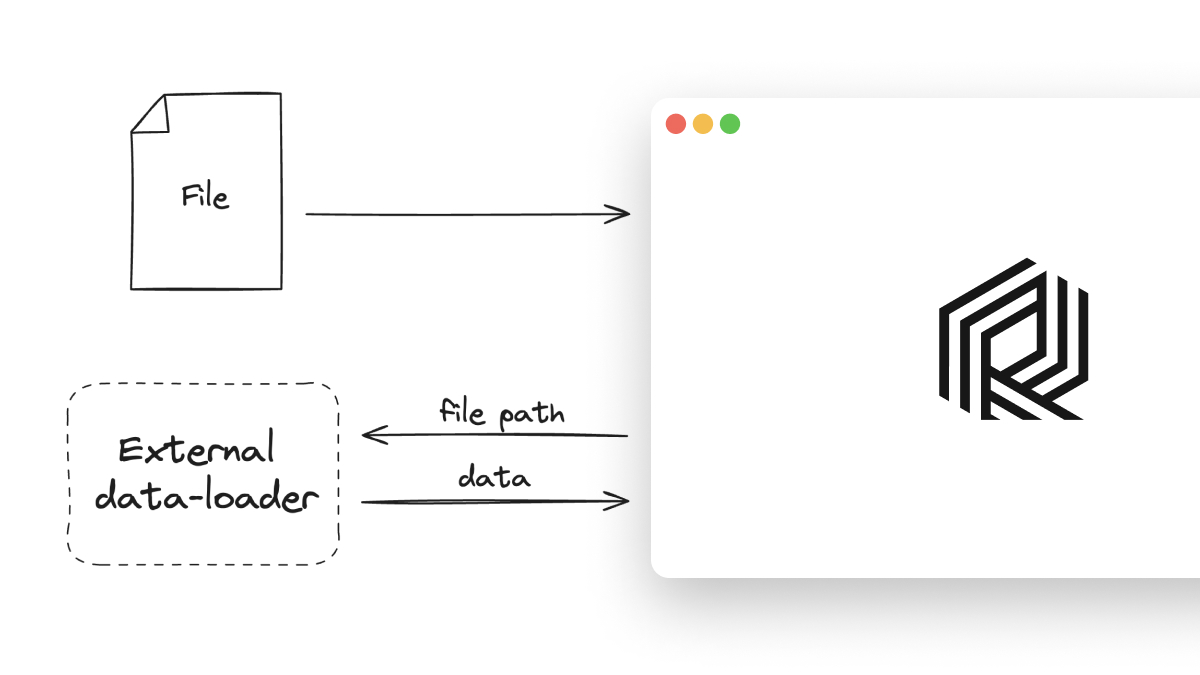
Rerun should be able to open any file containing data you want to see, whether it's highly complex, rare, or proprietary to your team. With the new plugin system for loading arbitrary files in Rerun's 0.12 release that is now starting to become possible.
The Rerun C++ SDK is now fully on par with our two other SDKs in Python and Rust. Thanks to some great community feedback we've added more options for integrating Rerun in your CMake projects.

The ability to log streams of multimodal data from C++ and visualize it live in Rerun has been our most requested feature since before our public launch in February. The C++ SDK is finally out, but getting here the right way has been a long road.

We're releasing Rerun 0.9.0 with a completely revamped API that gives more control over the underlying data model, a hierarchical and time aware Entity Component System (ECS).
Today we're making the the Rerun open source project public. Rerun is now installable as pip install rerun-sdk for Python users and cargo add rerun for Rust users.

Computer vision is revolutionizing the way we solve problems in the real world. At Rerun, we have the opportunity to work with developers who are creating innovative computer vision products. One company we want to highlight is PlayReplay.

Thirteen years ago, Willow Garage released ROS (the Robot Operating System) and established one of the standard productivity tools for the entire robotics industry.

Computer vision is a powerful technology solving real problems in the real world, already today. It holds the potential to significantly improve life on earth over the next decades. At Rerun we have the privilege to work directly with developers that are building that future. From time to time we will introduce companies building computer vision products for the real world. The first company we want to introduce is biped.

In his 2014 talk Seeing Spaces, Bret Victor envisioned an environment where technology becomes transparent, where you effortlessly see inside the minds of robots as you build them. This is the dream of everyone building computer vision for the physical world, and is at the core of what we're building at Rerun.

I've been a programmer for 20+ years, and few things excite me as much as Rust. My background is mostly in C++, though I have also worked in Python and Lua, and dabbled in many more languages. I started writing Rust around 2014, and since 2018 I've been writing Rust full time. In my spare time I've developed a popular Rust GUI crate, egui.


Rerun 0.20 adds early support for geospatial data with the new GeoPoints and GeoLineStrings archetypes and a new map view. It also adds H.264 support to the native viewer together with many performance and stability improvements for video in Rerun..
Rerun 0.19 brings two huge new features; the ability to view and query back Rerun data as dataframes, and part one of supporting encoded video data.
To enable working with more kinds of datasets in Rerun, the 0.18 release introduces a new column oriented API and performance improvements to help handle larger time-series.
Rerun 0.17 introduces blueprint defaults and overrides, bringing a massive step up in user control. For any visualizer input, you can now use the blueprint to set default values or override the data you logged.
You can now specify some blueprint properties through the Python log API. Among other things this lets you control the visible time range query per view from code.
Rerun 0.15 introduces Blueprint Python APIs for controlling the layout and contents of views in the Rerun Viewer. It also introduces the ability to save and load blueprints from file.
This is a follow up post that dives into how we managed to achieve such huge performance gains for time series (among other things), and why it was so hard in the first place.
The 0.13 release means teams can now correlate kHz resolution motion and perception data in Rerun. Seeing all your data and state together, correlated over time, is the most powerful thing you can do to understand your systems better.
Rerun should be able to open any file containing data you want to see, whether it's highly complex, rare, or proprietary to your team. With the new plugin system for loading arbitrary files in Rerun's 0.12 release that is now starting to become possible.
The Rerun C++ SDK is now fully on par with our two other SDKs in Python and Rust. Thanks to some great community feedback we've added more options for integrating Rerun in your CMake projects.
The ability to log streams of multimodal data from C++ and visualize it live in Rerun has been our most requested feature since before our public launch in February. The C++ SDK is finally out, but getting here the right way has been a long road.
We're releasing Rerun 0.9.0 with a completely revamped API that gives more control over the underlying data model, a hierarchical and time aware Entity Component System (ECS).
Today we're making the the Rerun open source project public. Rerun is now installable as pip install rerun-sdk for Python users and cargo add rerun for Rust users.
Computer vision is revolutionizing the way we solve problems in the real world. At Rerun, we have the opportunity to work with developers who are creating innovative computer vision products. One company we want to highlight is PlayReplay.
Thirteen years ago, Willow Garage released ROS (the Robot Operating System) and established one of the standard productivity tools for the entire robotics industry.
Computer vision is a powerful technology solving real problems in the real world, already today. It holds the potential to significantly improve life on earth over the next decades. At Rerun we have the privilege to work directly with developers that are building that future. From time to time we will introduce companies building computer vision products for the real world. The first company we want to introduce is biped.
In his 2014 talk Seeing Spaces, Bret Victor envisioned an environment where technology becomes transparent, where you effortlessly see inside the minds of robots as you build them. This is the dream of everyone building computer vision for the physical world, and is at the core of what we're building at Rerun.
I've been a programmer for 20+ years, and few things excite me as much as Rust. My background is mostly in C++, though I have also worked in Python and Lua, and dabbled in many more languages. I started writing Rust around 2014, and since 2018 I've been writing Rust full time. In my spare time I've developed a popular Rust GUI crate, egui.